论文题目:磁驱动智能粘附材料(Smart adhesives via magnetic actuation)
论文作者:赵晋生 李翔宇 谭宇 鲁太平 师明星
获奖等次:第三届川渝科技学术大会优秀论文一等奖
智能粘附材料由于其具有切换粘附性的功能,在自动化装配、转移印刷技术和软体爬行机器人等领域具有潜在的应用价值。然而,粘附性调节能力弱、切换粘附响应时间长、应用范围小等局限性限制了智能粘附材料的广泛应用。
西南交通大学力学与航空航天学院李翔宇教授课题组和师明星教授提出了一种以非接触的方式通过施加外部磁场实现切换粘附性的智能粘附材料。实验结果表明,外加磁场驱动结构变形,能够实现在选择性拾取操作和拾取与放置操作中进行快速地、可逆地、反复地切换粘附性,让智能粘附材料在微纳米芯片的自动化装配和软体机器人的攀爬等领域的应用成为可能。
该研究成果于2022年2月在国际顶级期刊Advanced Materials正式发表,第一作者为西南交通大学力学与航空航天学院博士研究生赵晋生。
起因:受自然界动物启发
赵晋生介绍,仿生粘附材料的研究始于本世纪初期。研究发现,壁虎之所以可以自由地攀爬在光滑的玻璃和垂直的墙壁上,归因于在其脚掌上分布着致密的蛋白质刚毛。随着蚂蚁、蜘蛛和壁虎这些爬行生物体重的增大,刚毛的分布形式和结构形貌呈现出密集化和纤细化的变化趋势,粘附性也逐渐增强。近年来,对仿生粘附材料的研究也取得了十足的进展,粘附性得到了大幅度提升。然而,在自动化装配和爬行机器人等领域,只具备超强的粘附性已经不能满足目前的需求。因此,开发设计可以快速地、可逆地、反复地切换粘附性的智能粘附材料十分重要。
多年来,李翔宇教授团队坚持在接触和界面裂纹方面进行深入研究,“结合近年来在多学科交叉研究方面取得的进展,我们认为可以施加外部磁场驱动粘附材料,通过在粘附界面产生初始裂纹的方式,实现智能粘附材料粘附性的快速切换。”赵晋生说。
“晋生提出这个想法的时候,我认为非常有趣,鼓励他大胆地去尝试,放手去做,我为他提供最大的支持。”李翔宇教授向记者介绍,“最初的设计四支悬臂梁结构,类似于抓手型,但是支撑的悬臂梁的厚度太薄,对充磁的要求极高,导致多次实验失败。后来,我们在研究过程中发现两种不同的界面失效形式,并查阅大量参考文献,同时向同行请教学习,最终提出基于蘑菇状结构的智能粘附材料。”在经过反复实验和验证之后,发现这种方式是可行的。
李翔宇教授介绍,“粘附是由多种因素共同导致的一种现象,而这项工作主要是从接触和裂纹扩展的角度研究了结构形貌和尺寸对粘附现象的影响。”他接着解释,将蘑菇状结构从目标物体上拔开时,在蘑菇状结构与目标物体之间的粘附界面上,界面应力会随着蘑菇状结构的几何尺寸呈现出两种不同的分布形式,进而导致两种界面失效,即边缘裂纹失效和中心裂纹失效。该项研究提出的智能粘附材料的结构是在蘑菇状结构的基础上增加了磁性梁。磁性梁在外部磁场的驱动下发生弯曲变形,导致在粘附界面的边缘位置产生初始裂纹。对于边缘裂纹失效破坏的粘附界面,如果磁性梁的弯曲已经在粘附界面的边缘位置产生了初始裂纹,那么,仅需要较小的拔开力就可以完成界面的失效破坏,从而实现粘附性的调控。
突破:开发出制备蘑菇状微结构的全新方法
一项科研工作的成功,不仅需要扎实的专业知识,更需要坚持不懈的态度。在研究过程中,制备方法的探索和开发是这项工作面临的最大困难。
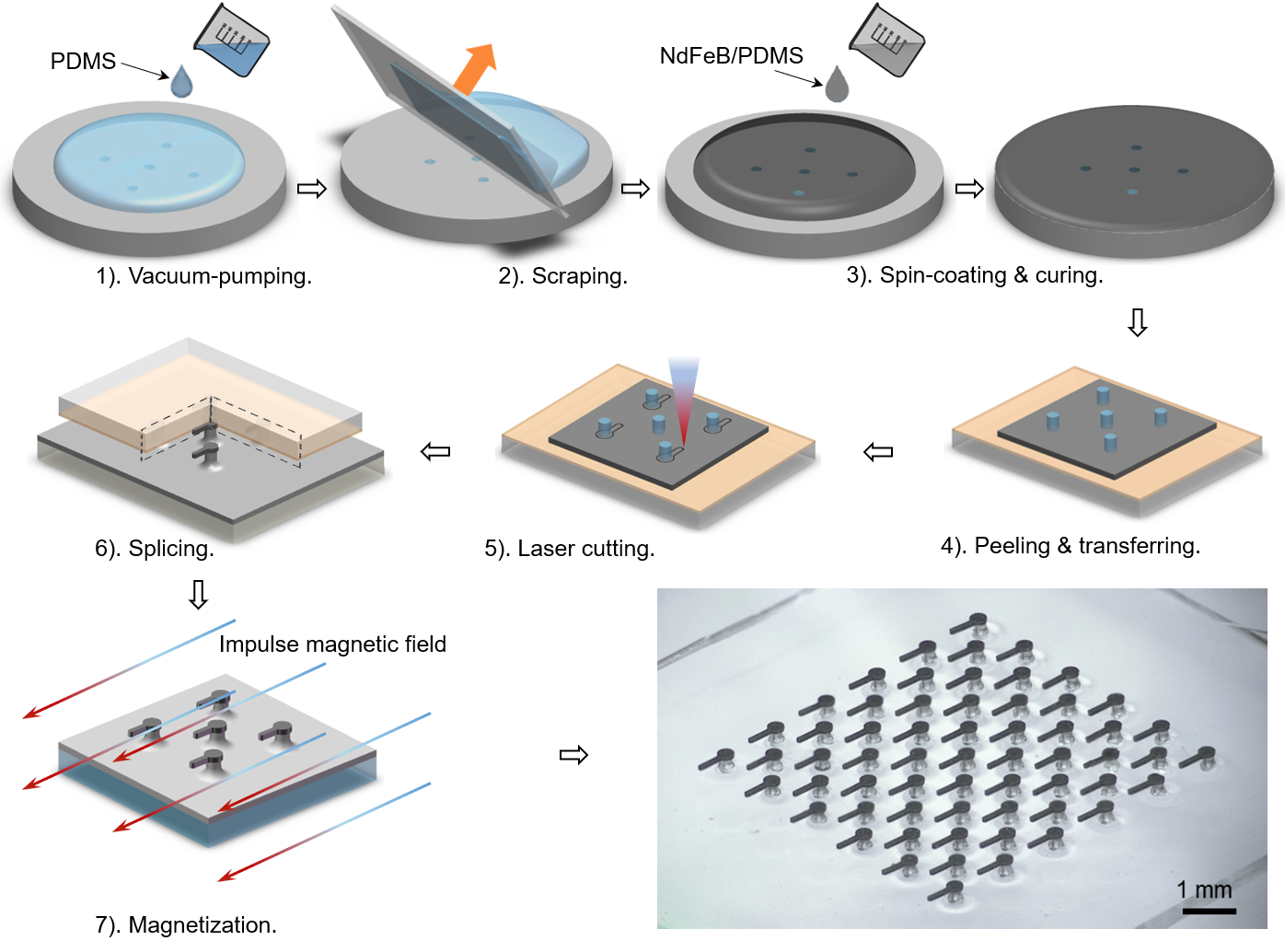
赵晋生介绍,目前,使用最广泛的制备方法是采用SOI或者双层光刻胶制备得到蘑菇状结构的反模,再采用倒模的方法得到蘑菇状结构。然而,这两种方法不仅材料成本昂贵,而且结构尺寸有所受限,并不适用于大规模的生产加工。
“这个实验能成功,大家都付出了很多,特别是晋生。”李翔宇教授告诉记者,“为了学习到最新的MEMS制备方法,晋生多次到江苏、浙江等沿海地区的科研厂家学习制备技术,与工人下车间进实验室,曾经有一年出差十四次。有的时候为了和师傅们沟通学习,需要常驻大半月;有的时候为了解决问题,三天之内从成都和苏州坐动车跑一个来回。”历时3年,团队独立开发出一套全新的制备方法,能够大规模的生产和加工形状各异的蘑菇状结构材料。如今,这套制备方法已获得国家授权发明专利4项。
创新:“打开”和“关闭”自由切换粘附性
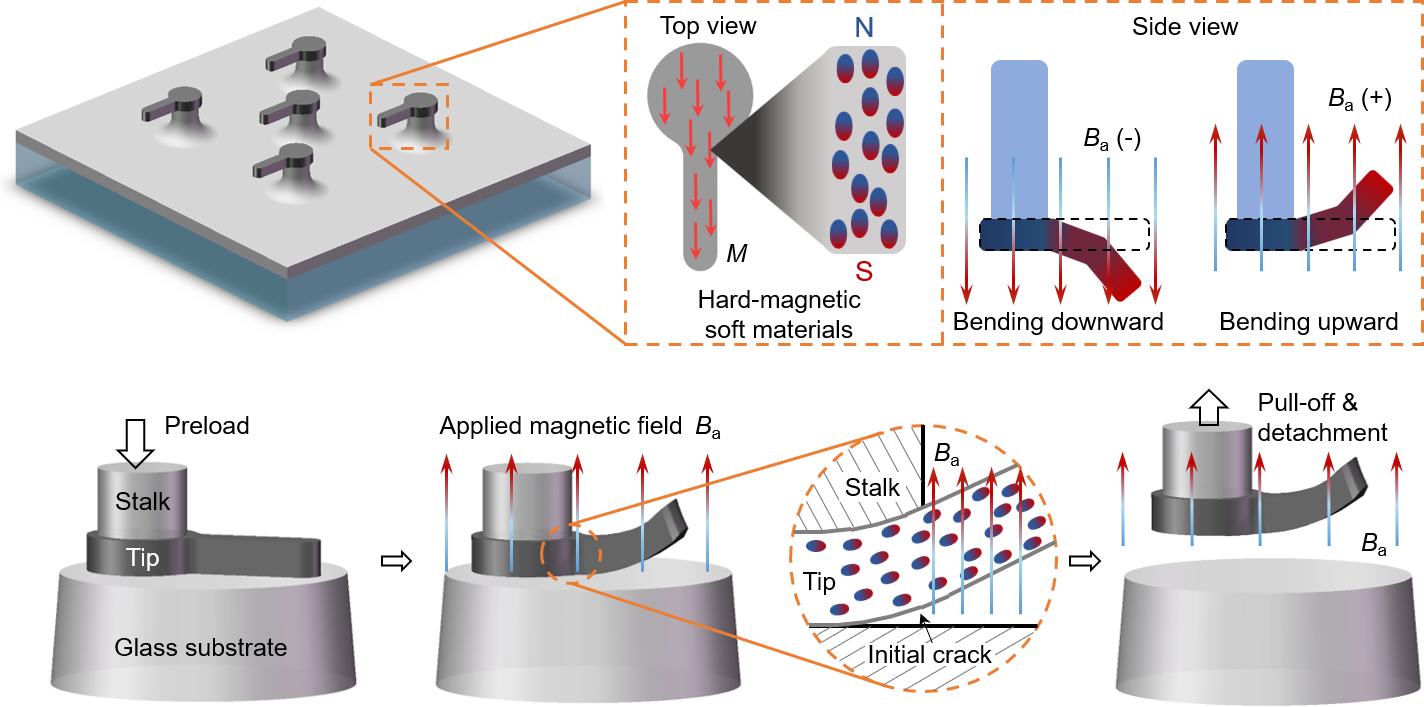
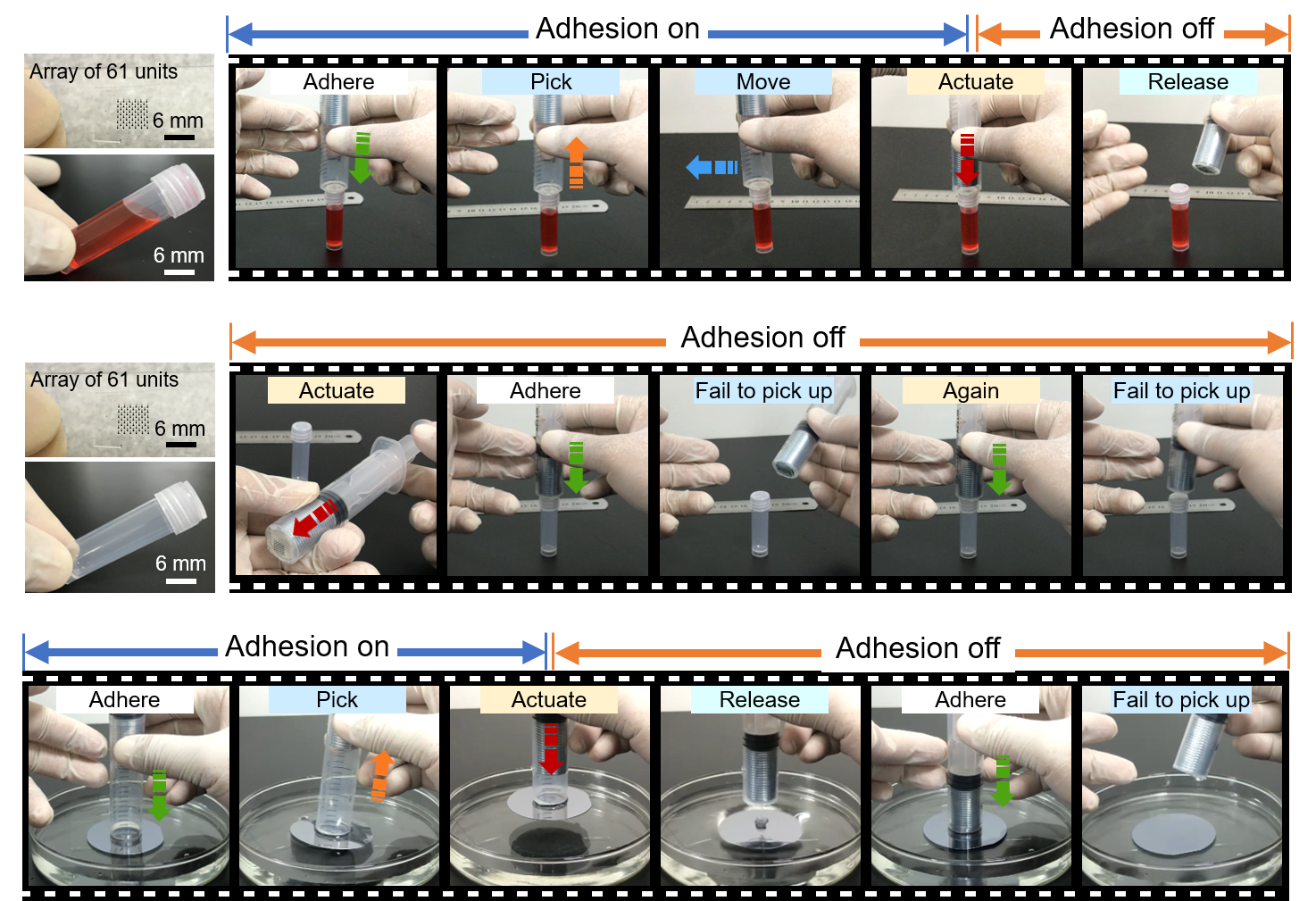
目前,在自动化装配和大规模集成等生产过程中,对芯片的选择性拾取尤为重要。赵晋生介绍,该项研究提出的智能粘附材料可以开发应用于两种工作模态,即选择性拾取模态和拾取与放置模态。在智能粘附材料与目标物体接触之前,通过施加(或者不是施加)外部磁场,改变(或者不改变)粘附材料的表面形貌,“关闭”(或者“打开”)粘附功能,从而完成对目标物体的不拾取(或者拾取)的目的,即为选择性拾取模态;对于拾取起的目标物体,需要转移到指定位置并进行释放,那么通过施加外部磁场,结构形貌的变化导致在粘附界面边缘位置处产生初始裂纹,大幅度降低粘附性,进而将拾取的目标物体进行放置,即为拾取与放置模态。两种模态结合就可以实现对阵列排布的芯片进行“逐像素”形式的选择性拾取,并完成转印和印刷的过程。
前景:可运用于干燥或潮湿环境
“这种智能粘附材料具有快速地、可逆地、可重复地切换粘附性特点,粘附性调节能力最高能够达到20倍以上,并且可以实现在0.5秒将拾取的物体释放的能力。”赵晋生说,经过实验验证发现,这种智能粘附材料可以应用于电子芯片的拾取与放置,也可以应用于实验室对试剂瓶和硅片等物体的拾取与放置。因此,在要求高精度和快响应的实际应用中具有潜在价值。同时,该智能粘附材料具有良好的使用耐久性,还可以应用于干粘附或者湿粘附的工作环境。
赵晋生希望在将来的研究工作中,将这种智能粘附材料开发应用于空间站。如果开发一种能实现可控粘附和释放的手套或鞋子,在空间站外面工作时宇航员就能更加自由和便捷。例如在迈步的时候关闭粘附,在不迈步的时候打开粘附,以便固定地站在原地。
收获:研究成果在国际权威期刊发表
实验成功后,李翔宇团队将论文投到了国际材料科学领域顶级期刊Advanced Materials。“在Advanced Materials期刊发表论文,是晋生的梦想。”李翔宇教授笑着说,“论文的发布过程虽然曲折,不过他的梦想最终还是实现了。”
“论文初稿写好后,我们花了一个月的时间对论文进行逐字逐句的修改。第一次投稿收到了编辑给出的转投建议。”李翔宇教授说,“从2018年开始,这项研究花了差不多四年时间,我不想大家的努力白费。因对这项研究的创新性非常有信心,于是我们写了申诉信,又对论文进行了补充和修改。”论文第二次投出去后,期刊编辑明显改变了看法,这次成功了。
“四年多的辛苦和努力都在论文被接受的那一刻得到了回报,艰苦付出是值得的。”李翔宇教授说,“这篇论文相当于为晋生圆了梦,看到他开心,我更开心。因为我也非常享受与学生在一起,享受在增长学问的过程中,师生关系的升温。”说到此,李翔宇教授脸上露出了灿烂的笑容,朴实的话语道出的却是真挚的师生情谊。
传承:科研精神代代传
“科技之花”结硕果,在第三届川渝科技学术大会暨四川科技学术大会上,该论文获得了优秀论文一等奖。“这篇论文能够获奖,我非常高兴,更为我的学生感到高兴。成绩的取得,是大家共同努力的结果,也离不开各方的支持。”李翔宇教授说,该项研究得到了国家自然科学基金、西南交通大学和力学与航空航天学院的大力支持。
谈及获奖,赵晋生直言,“论文能够获奖,要感谢我的恩师李翔宇教授和师明星教授在我的科研道路上的大力支持和悉心指导,在我认为几乎不能完成这项工作的情况下,是他们的坚持和鼓励给了我继续研究下去的动力。”
感到欣慰的同时,李翔宇教授也感慨地说:“说到支持和鼓励,我更想借此机会感谢我在浙江大学读书时的导师陈伟球教授和丁皓江教授,因为他们的精心培育和无私奉献,我才能很好地把所学到的知识运用到各项研究中,我也要将这种科研和奉献精神传给我的学生。”
党的二十大报告首次把教育、科技、人才进行统筹安排、一体部署,在李翔宇教授来看,这对科技工作者来说,是机遇更是挑战。“我希望我的学生,这些青年人才能够瞄准国家重大需求,做出更有显示度的科研成果,推动国家科技发展,加快实现高水平科技自立自强。”


















 川公网安备51010702043654号
川公网安备51010702043654号



{kind=link}
{kind=link}